Simultaneous Localization and Mapping
Location uncertainty is one of the main problems for robot navigation. In order to process uncertainty appropriately, sensor fusion as well as mapping and state estimation techniques are needed.
We have solutions for the following topics:
SLAM using extended Kalman filter.
SLAM using splines.
3D Mapping.
Next images show some examples applying SLAM techniques by using laser telemetry.
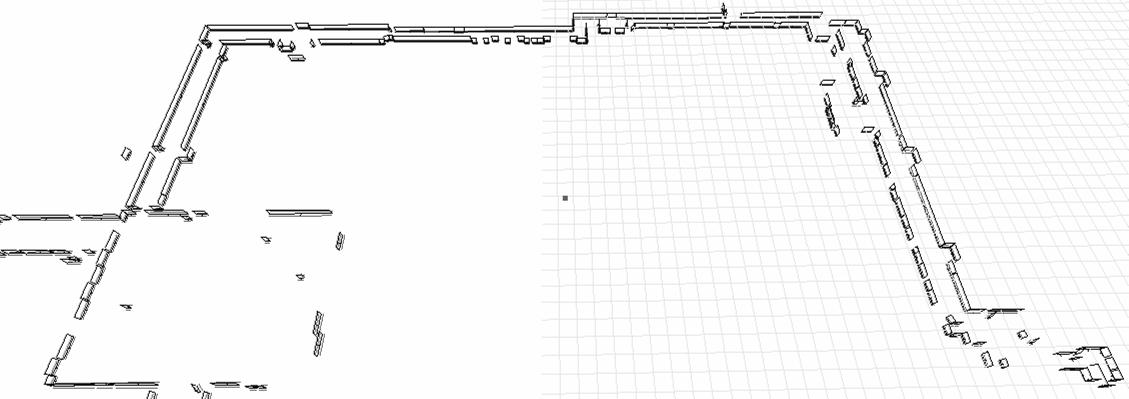
SLAM at UPM-ETSII main building

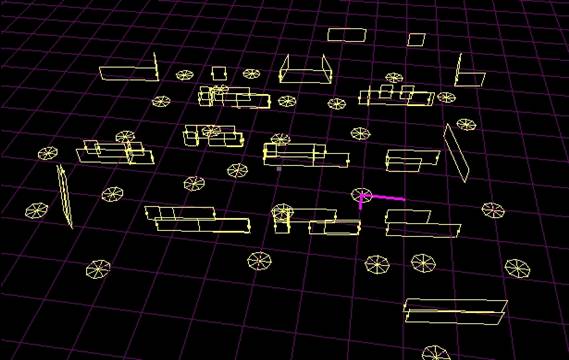
SLAM at "Principe Felipe" Science Museum of Valencia
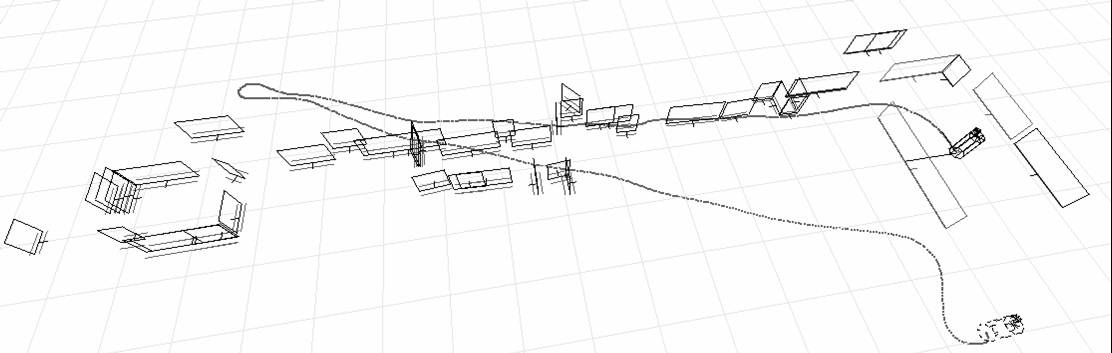
SLAM at "Principe Felipe" Science Museum of Valencia
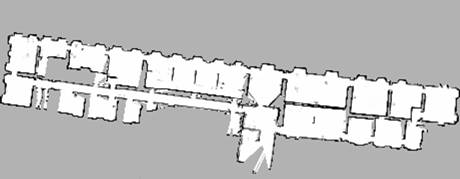
SLAM at UPM-DISAM laboratory, compared with odometry
Geometryc map obtained from Belgioioso castle.